
这是一只名叫Geoweaver的六足机器人。它是由美国旧金山的一群大学生设计和开发的一种以热敏塑料为耗材可移动3D打印机。它的壳体零件大都用激光切割或者桌面3D打印的方式制作。
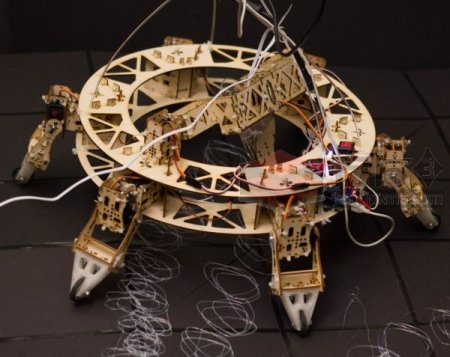
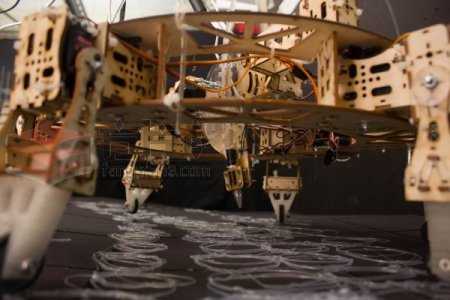
Geoweaver拥有6条腿,12个伺服电机、1个热胶枪打印喷头。在3D打印时,它先将图像投影到地面,再由中心机芯的2个伺服电机来控制打印喷头,使其能够在XY平面上活动;另1个伺服电机则推动挤出器齿轮,从打印喷头中挤出热胶。因此,只要6足机器人能够行走的区域就都能实现在地表进行3D打印。而这个6足机器人既可以走直线、曲线,也可以在有一定不平整度的地表攀爬、跨越,因而,这样的机械设计使得Geoweaver突破了3D打印机对打印平台面积和平整度的限制。
Geoweaver由Arduino Uno控制,可以直接从他们的教授Jason Kelly Johnson编写的CAD编辑软件Rhinoceros (犀牛)3D的一个名叫Firefly的插件获得指令。另外,Geoweaver还利用一个摄像头和reacTIVision基准来计算自己的所在位置, 计算出的拓扑信息则被用来确保打印路线的准确性。Geoweaver开发组甚至认为这台机器人在更大规模的3D打印中有潜力整合卫星智能,使打印机能够直接在各种地面条件下进行3D打印。
小编快评:这个打印机的概念什么的都挺好,就是精度还不成。如果有人能够在它的设计基础上改进一下打印喷头的设计,使喷头能更贴近地面,使打印精确度得以提高,再换上塑料线材、水泥之类的建筑耗材,那时候它的实用价值就不可限量了。。。
注:来源沙虫网


